#knowledgesharing
Wir geben unser Wissen weiter: Mit unseren Knowledgesharing-Artikeln bündeln wir unser gesamtes Cloud-Know-how in spannenden Fachbeiträgen. Damit auch du von unserer Expertise lernen kannst.

AWS
Die wichtigsten Erkenntnisse aus der Sicherung von APIs in AWS

AWS Lambda
Data Masking of AWS Lambda Function Logs

AWS
MFA-Anforderung für AWS-Root-Benutzer

Openshift
Ein Beispiel für den Einsatz von GitOps zur Bereitstellung einer modernen Anwendungsentwicklungsplattform

HYCU
Vereinfache deinen Datacenter Fussabdruck im hybriden Cloudzeitalter

HYCU
HYCU Data Protection bietet resilientes Backup-Management im hybriden Cloudzeitalter

HYCU
Digitale Transformation mit HYCU und Nutanix
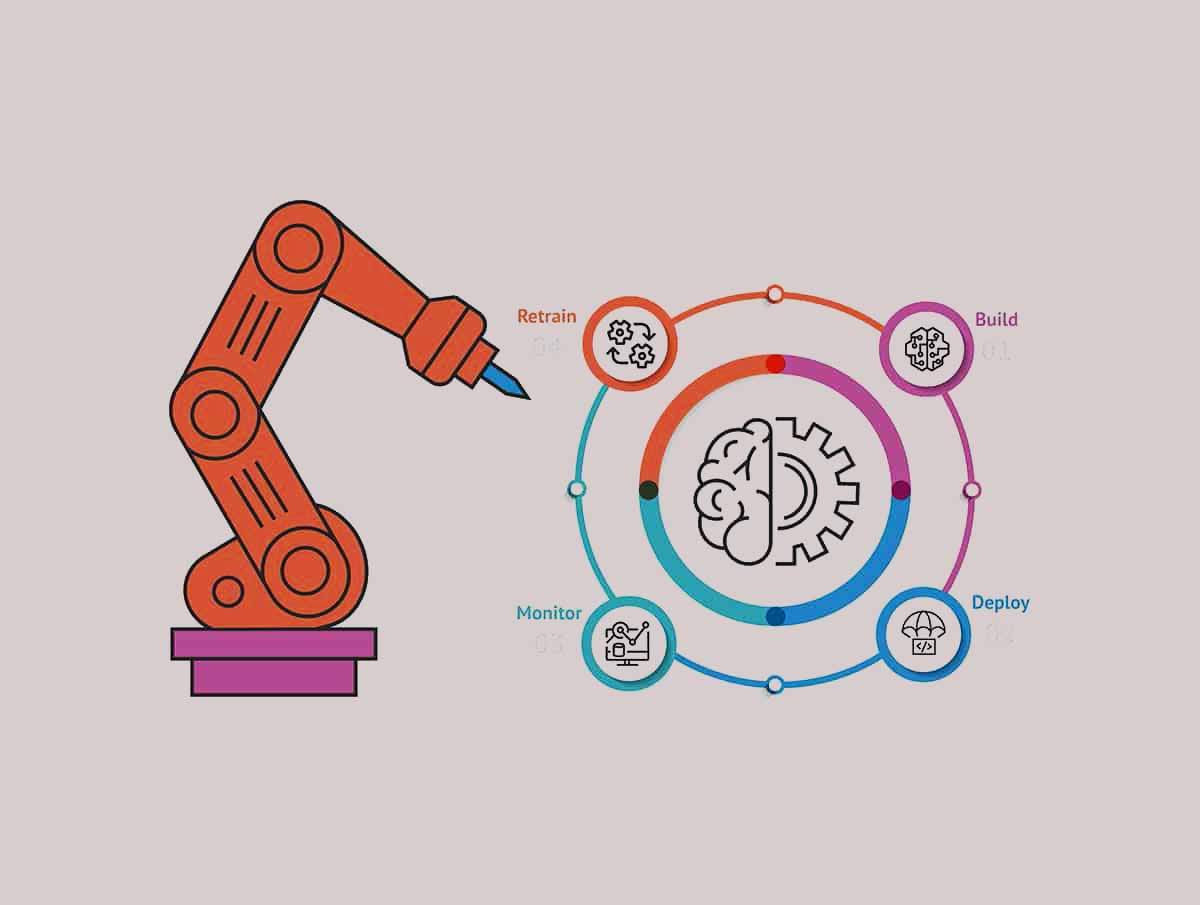
MLOps-Pipeline – Teil 2
Vollautomatisierte MLOps-Pipeline – Teil 2
MLOps-Pipeline – Teil 1
Vollautomatisierte MLOps-Pipeline – Teil 1
Amazon SageMaker Feature Store
Nahezu Echtzeit-Dateneingabe in den SageMaker Feature Store

AWS AppConfig
AWS AppConfig for Serverless Applications Demo

Containerisierung
Baue eine Cloud-native Plattform für Deine Kunden
AWS Data Lake
RDBMS Data Ingestion

AWS Lambda
Comparing AWS Lambda on ARM vs x86 architectures

E-Book
Top 20 Private Cloud questions answered

Disaster Recovery Plan
Wie genau funktioniert die Datenreplikation?

Green Cloud Computing
What can each of us do for a greener cloud?

Mulit-Cloud vs. CAF
Das AWS Cloud Adoption Framework erklärt.
Cloud Migration
AWS Landingzone Framework
Cloud Native
Wie wird eine Cloud Native Infrastruktur garantiert?

Case Study – Raiffeisen
Automatisierung im Übersetzungsprozess
MACHINE LEARNING IN DER PRAXIS
Whitepaper: Die natürlichen Chancen künstlicher Intelligenz

CASE STUDY – SBB
The connectivity problem
Training eines Models
Machine Learning in der Praxis

von techie zu techie
Cloudcademy Bootcamps
Mit unseren Bootcamps, Zertifizierungstrainings und Workshops bieten wir dir verschiedenste Veranstaltungen, in denen du dein Cloud-Wissen weiter ausbauen kannst. Melde dich noch heute für unsere kostenlosen Cloudcademy-Bootcamps an!
Webcasts

webcast
Reinforcement Learning 101 - What is Artificial Intelligence?


webcast
AWS kommt in die Schweiz

webcast
Don't backup, go forward

von Andreas Wenger
Tauche mit Andreas in die Backup-Lösung von Rubrik ein. Er erklärt dir das Dashbord, wie du deine SLA-Backup-Policies modernisiseren und automatisieren kannst und wie dich Ransomware Protection vor Angriffen schützt.

webcast
Das neue Homeoffice

webcast
AWS Serverless Landing Zone

von Dino Bektas

Demo-Video
Skaliere deine Serverkapazität mit der Hybrid-Cloud
Nicht genug Serverleistung für dein Weihnachtsgeschäft? Erfahre in unserem Demo-Video, wie du deine Serverleistung für kurze Zeit erhöhen kannst.

Lass die funken fliegen
Hast du Fragen?
Unsere erfahrenen Amanoxians beantworten dir gerne
deine Fragen und stehen dir beratend zur Seite.